
👋 About Me
I am currently a Research Fellow at the MIT Media Lab and Harvard Medical School, working with Prof. Paul Liang, Prof. Fadel Adib, Prof. Mengyu Wang, and Prof. Yilun Du. Previously, I earned my Ph.D. in Computer Science at the University of Oxford under the supervision of Prof. Niki Trigoni and Prof. Andrew Markham, and graduated with First Class Honours (Top 10%) from the Department of Computing at Imperial College London, where I worked with Prof. Yike Guo.
🔍 Research Directions
Understanding Dynamic 3D Worlds: Developing models that can accurately see and understand changing real-world environments — including geometry, motion, and object interactions — in real time.
Building Intelligent Robots That Can Act: Creating robots that use perception to guide their actions, correct mistakes, handle occlusions or disturbances, and collaborate smoothly with humans.
Predictive World Models: Designing systems that can imagine future events, predict how scenes will change, and reason about human intentions — enabling safer, more reliable, long-horizon decision making.
🏆 Award
ACM MobiSys 2025 — Around 2.5% – Best Paper Nominee. [Link]
IROS 2024 — Around 0.1% – Finalist for Best Application Paper Award. [Link]
IROS 2024 — Excellent Practice Award at EDM Workshop. [Link]
Smartathon 2023 — 2nd place out of ~5000 participants.
AWS Lighthouse Scholarship 2020 — Fully funded for Oxford DPhil Program.
✍️ Opportunities
If you are interested in my research, please feel free to contact me via my work email.
📖 Publication
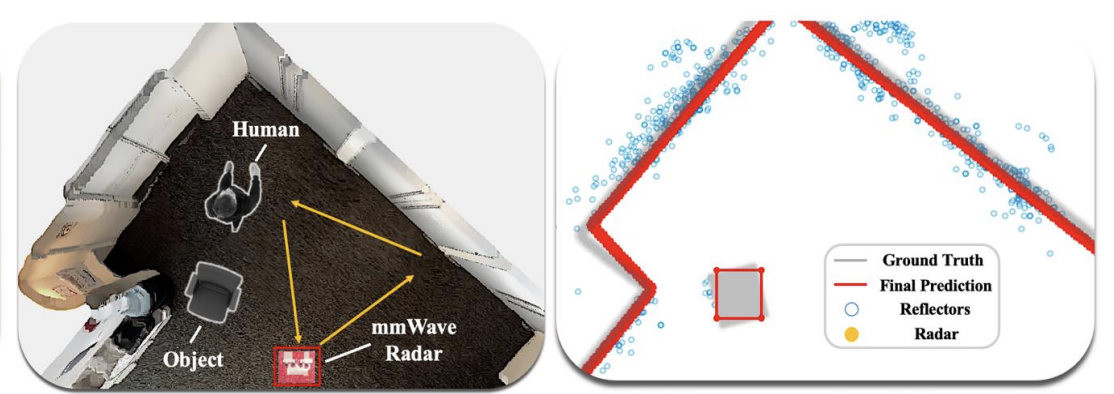 | RISE: Single Static Radar-based Indoor Scene Understanding Kaichen Zhou, Laura Dodds, Sayed Saad Afzal, Fadel Adib CVPR 2026 Paper |
 | Abstract 3D Perception for Spatial Intelligence in Vision-Language Models Yifan Liu, Fangneng Zhan, Kaichen Zhou, Yilun Du, Paul Pu Liang, Hanspeter Pfister CVPR 2026 Paper |
 | PAGE-4D: Disentangled Pose and Geometry Estimation for VGGT-4D Perception Kaichen Zhou, Yuhan Wang, Grace Chen, Xinhai Chang, Gaspard Beaudouin, Fangneng Zhan, Paul Pu Liang, Mengyu Wang ICLR 2026 Paper · Webpage |
 | HybridVLA: Collaborative Diffusion and Autoregression in a Unified Vision-Language-Action Model Jiaming Liu, Hao Chen, Pengju An, Zhuoyang Liu, Renrui Zhang, Chenyang Gu, Xiaoqi Li, Ziyu Guo, Sixiang Chen, Mengzhen Liu, Chengkai Hou, Mengdi Zhao, Kaichen Zhou, Pheng-Ann Heng, Shanghang Zhang ICLR 2026 Paper · Webpage |
 | Non-Line-of-Sight 3D Object Reconstruction via mmWave Surface Normal Estimation Laura Dodds, Tara Boroushaki, Kaichen Zhou, Fadel Adib ACM MobiSys 2025 – Best Paper Nominee Paper · Webpage |
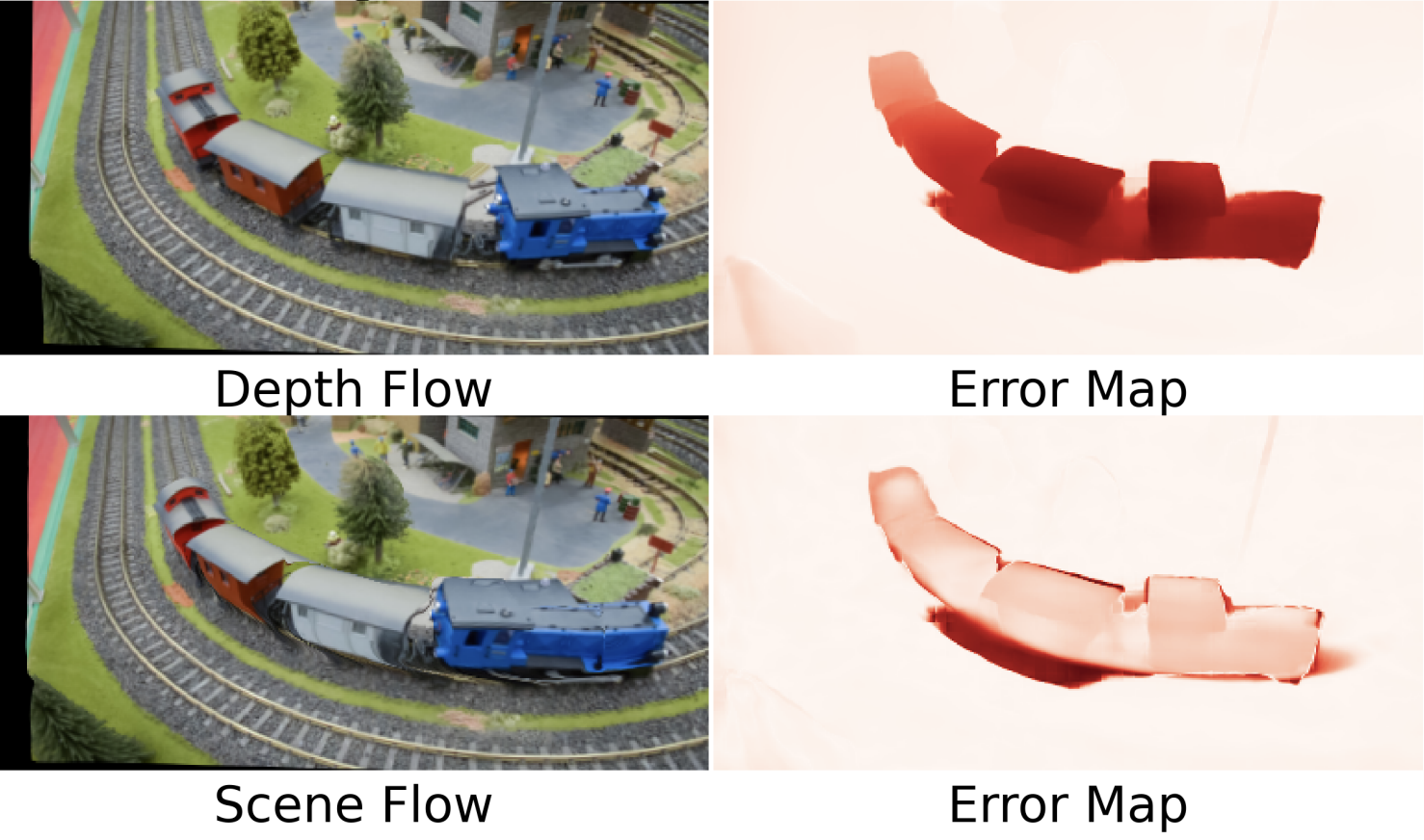
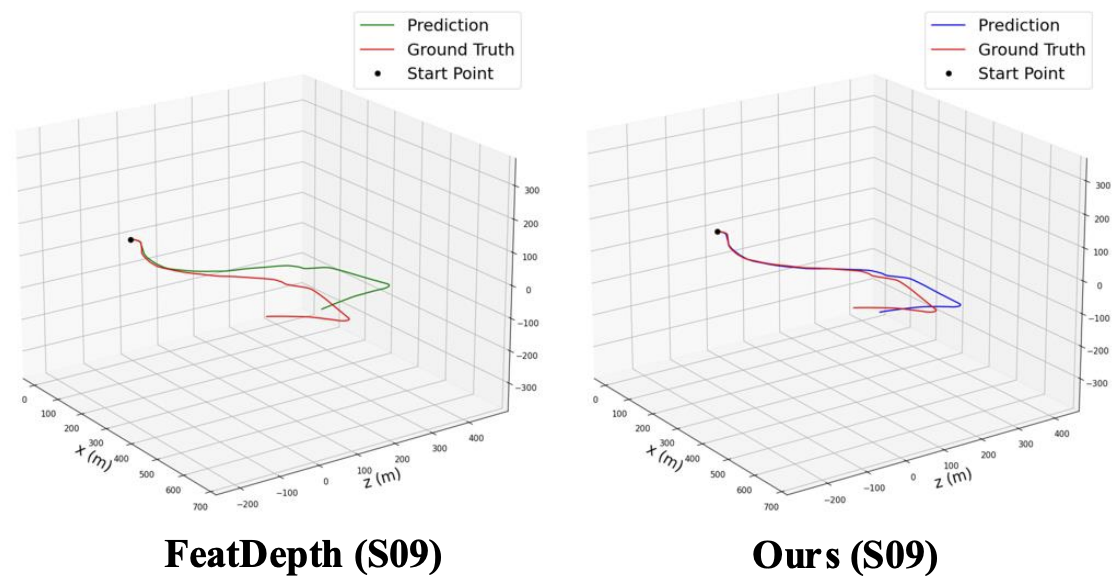 | Manydepth2: Motion-Aware Self-Supervised Monocular Depth Estimation in Dynamic Scenes Kaichen Zhou, Jia-Wang Bian, Jian-Qing Zheng, Qian Xie, Niki Trigoni, Andrew Markham RAL 2025 & ICRA 2026 Paper · Code |
 | SCANet: Correcting LEGO Assembly Errors with Self-Correct Assembly Network Yuxuan Wan, Kaichen Zhou (Co-First), jinhong Chen, Hao Dong IROS 2024 – Finalist for Best Application Paper Award Paper · Webpage |
 | RGBGrasp: Image-based Object Grasping by Capturing Multiple Views during Robot Arm Movement with Neural Radiance Fields Chang Liu, Kejian Shi, Kaichen Zhou (Co-First), Haoxiao Wang, Jiyao Zhang, Hao Dong RAL 2024 Paper · Webpage |
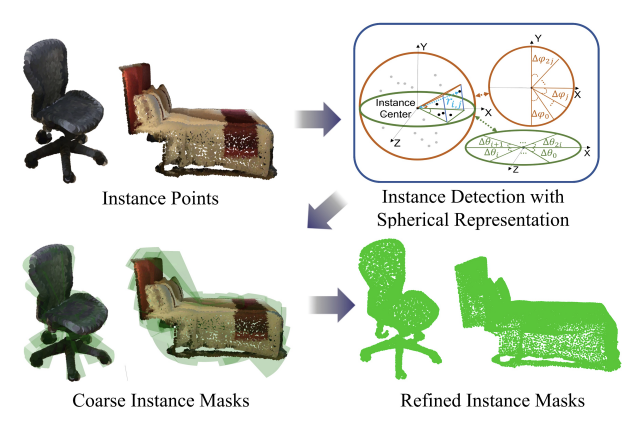 | Spherical Mask: Coarse-to-Fine 3D Point Cloud Instance Segmentation with Spherical Representation Sangyun Shin, Kaichen Zhou (Co-First), Madhu Vankadari, Andrew Markham, Niki Trigoni CVPR 2024 Paper · Code |
 | DynPoint: Dynamic Neural Point For View Synthesis Kaichen Zhou, Jia-Xing Zhong, Sangyun Shin, Kai Lu, Yiyuan Yang, Andrew Markham, Niki Trigoni Neurips 2023 Paper · Code |
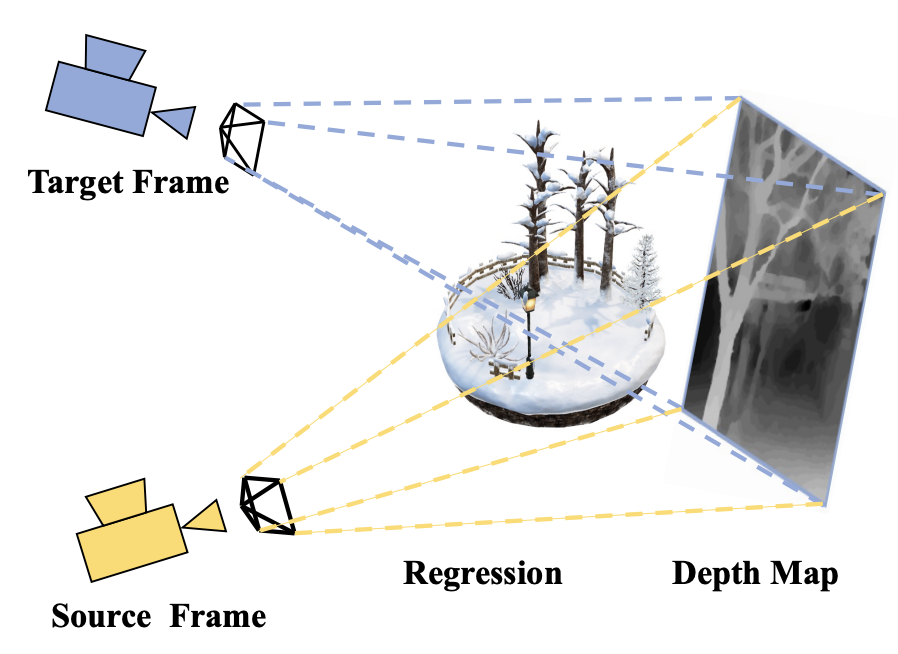 | DevNet: Self-supervised Monocular Depth Learning via Density Volume Construction Kaichen Zhou, Lanqing Hong, Changhao Chen, Hang Xu, Chaoqiang Ye, Qingyong Hu, Zhenguo Li ECCV 2022 Paper · Code |
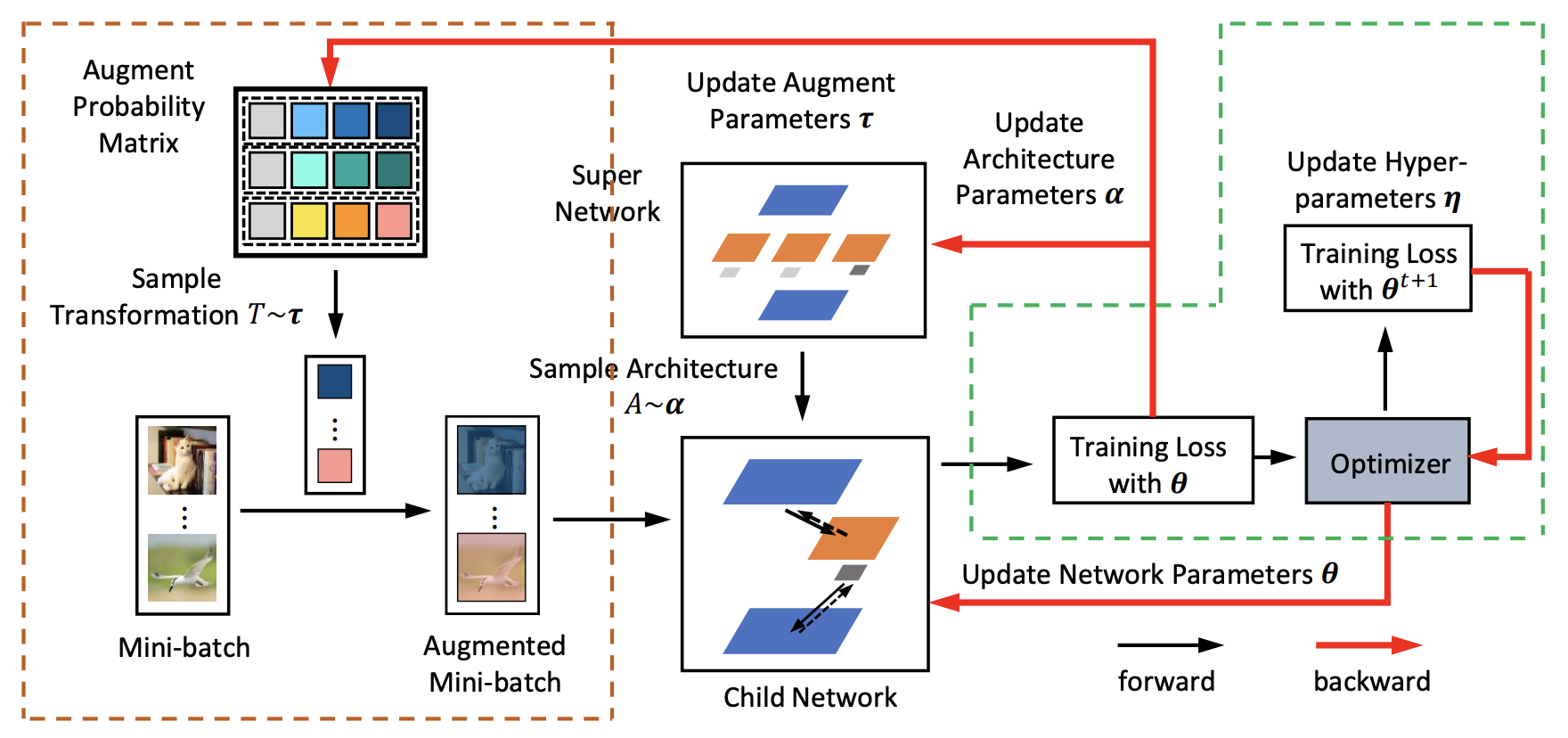 | DHA: End-to-End Joint Optimization of Data Augmentation Policy, Hyper-parameter and Architecture Kaichen Zhou, Lanqing Hong, Shoukang Hu, Fengwei Zhou, Binxin Ru, Jiashi Feng, Zhenguo Li TMLR 2022 Paper |
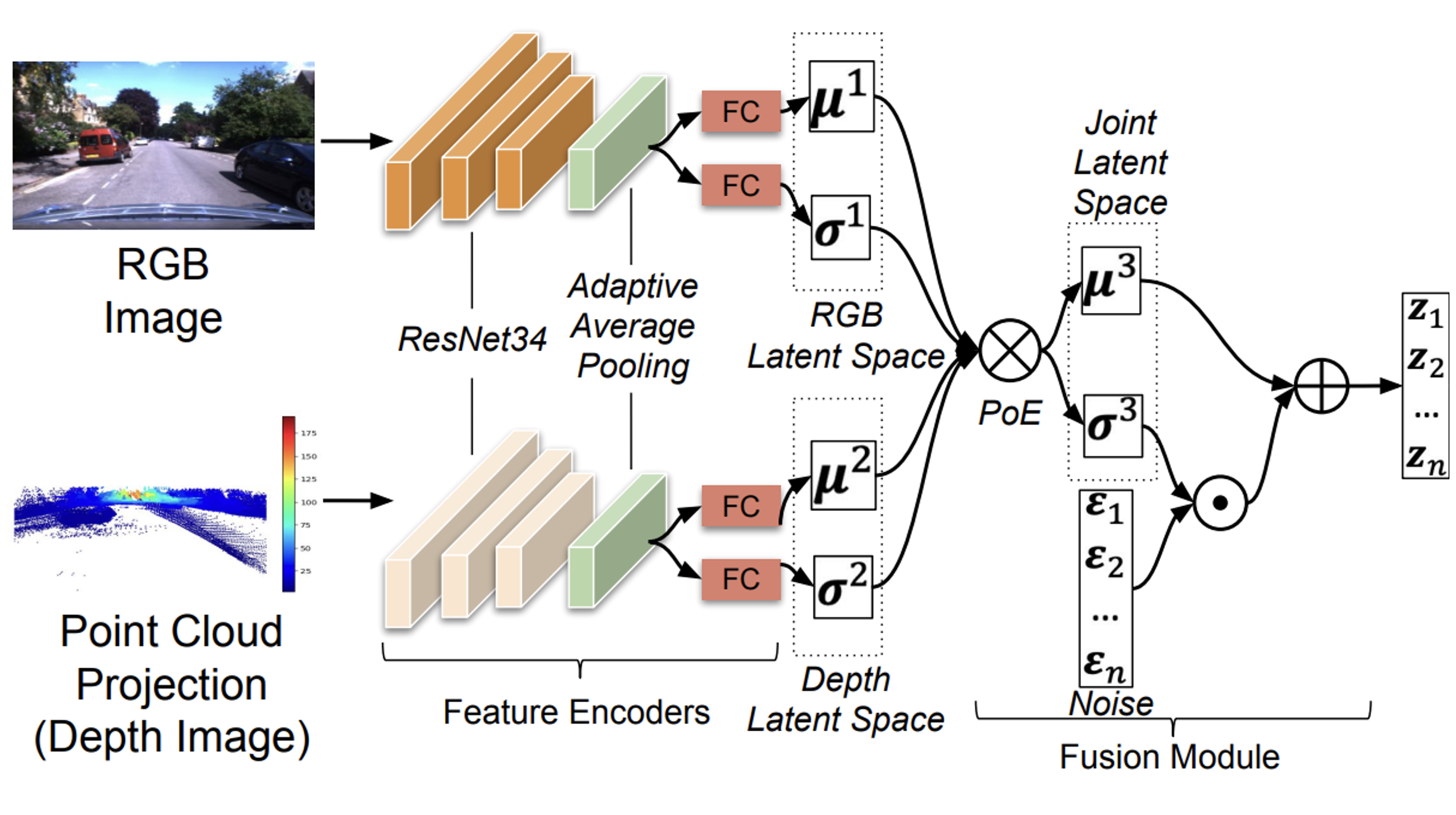 | Vmloc: Variational fusion for learning-based multimodal camera localization Kaichen Zhou, Changhao Chen, Bing Wang, Muhamad Risqi U Saputra, Niki Trigoni, Andrew Markham AAAI 2021 Paper Code · |
🧑🎓 Students
Advaith Ravishankar (Harvard Master)
Yuzhen Chen (Harvard Master)
Gaspard Beaudouin (ENPC Master)
Weihan Xu (DUKE Master)
Yuhan Wang (Imperial College London Master)
Jiadong Zhang (CMU Master)
Xinhai Chang (PKU Undergraduate)